摘 要: 智能駕駛作為人工智能的重要產業落地場景和經濟增長新引擎,是重塑未來交通格局的顛覆性技術,具有重要價值。駕駛腦是當前智能駕駛產業鏈中的薄弱環節,它應該獨立于車體,能夠模塊化并大批量生產,適用不同車體,具有基礎性、開放性和可成長性。車輛具身智能作為連接認知空間與物理空間的橋梁,通過駕駛腦的“觀察-定位-決策-行動”認知循環,將信息感知、態勢理解、決策規劃與車身控制融為一體,構建起完整的“感知-思維-行為”閉環。人工智能的下一個里程碑,將是機器具身圖靈測試的常態化,智能駕駛車輛的具身圖靈測試將成為機器智能測試的領頭羊。
關鍵詞:智能駕駛 具身智能 認知機器 人機共生
【中圖分類號】U463.6 【文獻標識碼】A
2025年10月,黨的二十屆四中全會指出:“抓住新一輪科技革命和產業變革歷史機遇,統籌教育強國、科技強國、人才強國建設,提升國家創新體系整體效能,全面增強自主創新能力,搶占科技發展制高點,不斷催生新質生產力”[1],強調加強原始創新和關鍵核心技術攻關,推動科技創新和產業創新深度融合等內容。高級別智能駕駛汽車作為人工智能的重要產業落地場景和經濟增長新引擎,是搶占科技發展制高點必不可少的一部分,也是重塑未來交通格局的顛覆性技術。我國對新能源車、線控底盤、傳感器及人工智能技術的高接受度,以及相對開放的數據應用場景,為數據驅動的算法迭代提供了開放的應用場景,為智能駕駛產業發展提供了有利條件,有望引領這場智能制造的變革。
智能駕駛產業化的發展規律與前景
汽車有著近200年制造發展的輝煌歷史,是工業革命的典范,智能駕駛也將成為智能制造的典范。高技術產品、應用市場、成本控制與生態四個因素的協同突破,是汽車產業化成功的關鍵,也將是智能駕駛產業化的關鍵。較于傳統汽車產業,智能駕駛產業化更具復雜性。智能駕駛匯聚人工智能黑科技,配置有異構傳感器和機器駕駛腦的高級別智能駕駛車輛的量產,具有較強的“頭雁”效應,將成為各國智能產業的重要支柱。
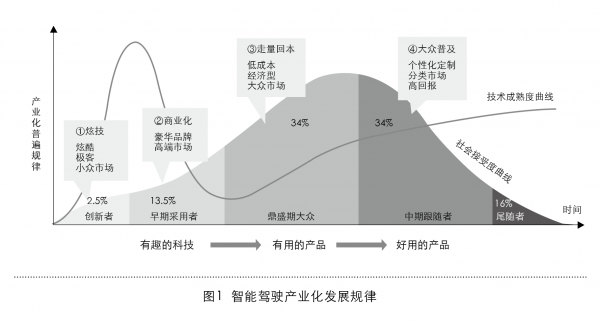
產業化的發展過程存在著普遍規律,一般來說都是從有趣的科技起步,遵循清晰的階段性規律,對應技術成熟度曲線與社會接受度的動態變化(如圖1)。初始階段是創新者的天下,他們專注于炫技與吸引眼球,在小眾市場打開局面,讓新技術從概念走向初步實踐。隨后進入早期采用者階段,商業化的驅動力增強,通過打造豪華品牌與高端市場,推動技術從“有趣”向“有用”轉化,形成初步的價值認同。當產業邁向鼎盛期,大眾市場成為核心,以量產回本為目標構建低成本、經濟型產品體系,讓技術真正成為“有用的產品”,實現規模化落地。緊接著,中期跟隨者推動產業向更廣的受眾普及,通過個性化定制與分類市場的細分需求,追求更高價值回報,促使“有用的產品”向“好用”進階。最后,尾隨者完善市場生態,填補細分領域空白,推動產業從成熟走向穩定,形成覆蓋全需求鏈條的良性循環。展望高級別智能汽車的發展前景,在孵化期前五年,智能駕駛將首先應用于特種車和商用車領域;后五年則實現從“有趣”向“有用”的跨越,產業鏈配套逐步完善。進入大規模發展期,智能駕駛車將不再是簡單的軟件定義汽車,而是具備交互智能和記憶智能的輪式機器人。
汽車通過方向盤、油門和剎車,延伸了人類的四肢和體力。車子成為受控制的身體的一部分,這是人體工程學的成功實踐。盡管車輛動力學研究日趨成熟,汽車自動化也取得長足進步,但智能汽車如果不能像人類一樣具備與時俱進的學習能力,則難以獲得社會的真正信任與認可。
無論智能汽車產業化發展到何種程度,其必須堅守的一條重要原則:不得強行要求人類社會適應機器。對于緊急狀態下駕駛員接管的責任邊界與安全機制必須明確界定,車輛應該能安全可靠地自行停止以適應人類接管。因此,智能駕駛車輛必須具備與多人溝通交互的能力,具身交互在這一過程中具有重要作用。
智能駕駛產業化的必由之路:駕駛腦的模塊化
從整體來看,作為高技術產品的機器駕駛腦,承載著實現車輛智能的關鍵使命,也是當前智能駕駛產業鏈中的薄弱環節。駕駛腦應預置駕駛地圖、駕駛常識、駕駛經驗和事故防范,適用不同車體,且具備基礎性、開放性和可成長性特征。智能駕駛更核心的是駕駛認知的形式化,是機器駕駛腦的研發和量產。駕駛腦必須模塊化,獨立于車輛硬件形成標準化產品,才能實現技術與產業的分工協同,駕駛腦的模塊化設計應該讓車企廠商專注于車身制造,讓人工智能廠商深耕駕駛認知。
從系統架構角度分析,駕駛腦的三大功能模塊與認知空間的形成密不可分。物理空間的傳感器信息處理模塊,負責跨模態感知融合,尤其是雷達、相機與車輛位置地圖的融合;認知空間的思維決策模塊,承擔駕駛態勢認知與決策生成,重點關注車輛實時路權;物理空間的運動控制模塊,通過底盤控制輸出方向盤轉角、油門(包括電機轉速與扭矩)及制動量的控制指令。
駕駛腦實現認知循環的具體路徑,可通過四個緊密銜接的步驟清晰呈現。第一步,物理空間的場景感知和融合。在瞬時記憶里完成跨模態感知融合,包括從智能網聯獲得的環境感知、車載雷達的空間感知、車載相機的圖像感知和地理道路感知的融合,生成當前車輛所在的完整駕駛地理場景。第二步,認知空間的態勢認知。聚焦當前路權,在工作記憶里生成車輛當前的對數極坐標駕駛態勢圖。第三步,認知空間的行為決策。分析駕駛態勢,根據車輛擁有的實時路權,生成行動的決策方案。第四步,物理空間的機器具身行為控制。通過對車輛機電系統的控制,生成控制指令,如方向盤轉角、油門和制動等控制量,致使具身行為改變,同時建立閉環反饋機制確保動作執行的精度與實時性。
駕駛腦借助三類記憶完成感知、認知、決策和控制。車載定位傳感器要求能夠達到厘米級導航精度;車姿傳感器能夠測量車身的加速度和速度;視覺傳感器看圖像、看語義,雷達傳感器看距離、認障礙,還可以借助智能網聯獲得更多環境信息。對這些信息在瞬時記憶里進行跨模態融合形成周邊情境感知,在工作記憶里聚焦路權,形成當前駕駛態勢認知,而后借助長期記憶里的駕駛地圖、交通規則、典型場景駕駛技巧庫、安全風險提示庫和事故記憶棒等功能模塊,形成行為決策方案,通過汽車的控制平臺改變車輛具身行為。駕駛腦存在三類總線,出發前,通過交互總線完成路徑的一次規劃;行進中,通過決策總線完成路徑的二次規劃(實時規劃);通過控制總線來完成汽車具身的運動學和動力學行為。感知、認知、決策、控制形成反饋回路,并構成再感知、再認知、再決策、再控制的認知循環。
車輛具身:連接認知空間和物理空間的橋梁
深度學習領域中“預訓練+微調”的技術路徑,同樣適用于高級別智能駕駛領域。駕駛腦的關鍵能力,本質上是通過認知機器對標桿駕駛員日常駕駛中那些分散的、端到端的典型小場景駕駛技巧進行深度學習所積累的,逐步形成可交互、能學習、會進化的車輛智能駕駛系統。這一路徑印證了認知物理學的主要思想——始終以駕駛認知為實驗載體,以車輛為實體依托,通過持續優化機器駕駛腦,最終實現從輔助駕駛、智能駕駛到自主駕駛的階段性跨越。
區別于傳統人工駕駛,智能駕駛的重點在于實現駕駛認知中的“OODA循環”——即觀察(Observation)、定位(Orientation)、決策(Decision)與行動(Action)的閉環過程[2]。車輛通過各類異構傳感器在物理空間完成對周邊環境和自身狀態的瞬時感知,在認知空間的工作記憶區,利用選擇性注意力機制,識別當前場景,從感知的各類跨模態信息中,提取出與駕駛活動相關的要素,形成駕駛態勢和實際擁有路權的變化;從長期記憶中提取相關知識,對態勢進行分析和理解,作出每次的操控決策。通過“感知—思維—行為”的循環過程[3],實現機器認知與物理世界的有效銜接。這一過程打破了傳統圖靈機“孤立思維、忽視具身”與“孤立計算、忽視記憶”的局限。車輛具身因而成為連接認知空間與物理空間的橋梁。在物理空間表現出的具身智能,完全可以和駕駛腦認知空間的計算智能、記憶智能媲美并列。車輛與環境的交互[4],不僅是智能駕駛車輛友好用戶界面設計、圖形交互界面設計、擬人化交互服務的方法學問題,更是知行合一、人機共生的問題。從對物理世界的感知出發,信息進入駕駛腦進行思維與決策,再通過具身反饋至物理世界,從而在感知、認知與行為之間不斷迭代。
車輛智能的進化遵循一個循序漸進的路徑,涵蓋三個關鍵學習環節:首先是標桿駕駛員操作、機器駕駛腦學習,這是指導學習;然后是駕駛腦自作業、標桿駕駛員干預,這是半指導學習;再是機器自操控、自學習,這是自主學習。機器只有自學習,不斷迭代,才能實現認知的自成長。機器學習的結果是記憶,鞏固或微調已有的記憶網絡。記憶智能成為新一代人工智能中多領域、多情境中可計算智能的邊界和約束,確保記憶和計算的協同。
可交互、會學習、自成長,成為認知機器的新硬核,其最基本的特征是能夠在與環境的交互過程中學習、糾錯和成長,可以接受指導學習和強化學習,也可以自主學習,增強記憶。認知機器的學習和作業,包括先入為主、賦予任務、引導、釋疑、解惑、交互認知、監督等有指導的學習。自主學習是把指導學習的結果轉為長期記憶的重要環節,如復習、消化理解、自己糾錯。如果把指導學習稱為有監督學習,自主學習稱為無監督學習,就過于簡化了。一次性學習之后常常是短期記憶,間隔性地重復學習有利于形成和鞏固長期記憶,重復學習的時間間隔非常重要,充滿不確定性,體現自糾錯和長期記憶的自成長能力。當人與機器通過有效交互達成預設任務時,人類指導機器學習、機器開展自主學習,逐步理解人類設定的任務目標,這一過程被稱為使命對齊,最終實現精準作業并具象化展現智能。機器學習過程主要包含三個環節:專家操作與機器學習協同;機器自動運行時接受人類干預;機器實現自操控、自學習、自糾錯及自成長。這三個環節通過循環迭代,逐步實現從有指導學習到半/弱指導學習,最終邁向自主學習的進階路徑。
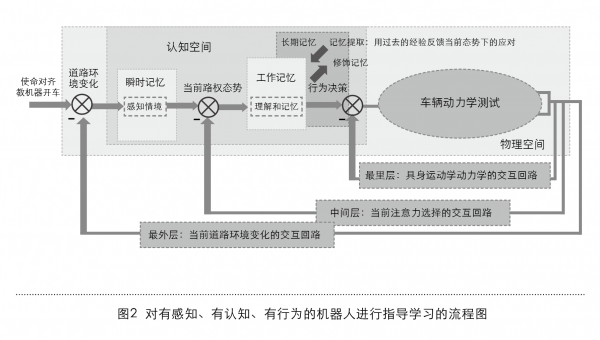
為實現智能的穩定與持續成長,認知機器依賴于多重嵌套的交互回路設計(如圖2):包括內外層交互,外層大交互是開車使命與道路環境的交互,確定機器當前所在的地理位置,構成空間智能;中間的交互是瞬時記憶與注意力(路權)進行交互,聚焦當前態勢,經過工作記憶和長期記憶的協同和推理,形成決策;最內層是自動控制的反饋回路,在出發前的一次規劃的基礎上,沿當前決策的實時規劃(二次規劃)行駛,形成車輛具身動力學,構成行為智能。
在特定環境下接受指導學習時,機器通過“觀察—判斷—決策—行動”的認知螺旋迭代,實現知識自成長。在觀察階段,機器在指導者帶領下主動融入物理空間,細致感知環境變化(區別于傳感器被動接收),聚焦問題背景與要素,以形成注意力。其中,判斷是關鍵環節,需在認知空間結合指導者提供的知識、既有經驗及觀察現象,通過演繹推理分析現象(運用數學與物理原理),評估方案優劣風險后決策;若判斷受阻則回溯觀察。決策依賴長期記憶中的知識模型,若觀察判斷不足需退回前序步驟,否則難以形成有效方案。最終行動階段將決策付諸實踐驗證,結果反饋至下一輪循環。指導的關鍵在于促進長期記憶網絡的微調整——若學習后長期記憶無改變則無效;僅留淺層記憶或易遺忘,也是無效;唯有節點質量或連接強度微提升,方為有效。機器通過瞬時工作、長期記憶區的協同,使每次學習結果成為下次迭代的初始值,最終實現智能的迭代成長。
機器具身在與環境的交互中,形成物理空間位置感,通過跨模態感知,把物理空間要解決的現實問題轉換到認知空間,在認知空間不同記憶區留下帶時間印記的抽象,可以從長期記憶區直接提取問題解決方案,也可以在工作記憶區進行推理、思考或計算,求得問題解決方案,然后通過智能行為作用到物理空間,形成感知-認知-行為環,交互中的時空智能。物理空間(外在的環境)和認知空間(內在的思維)不停地相互映射、調整,獲得虛擬現實感。
未來展望:人機協同與交通生態重構
2025年8月,國務院印發《關于深入實施“人工智能+”行動的意見》,提出“探索無人服務與人工服務相結合的新模式”,以及“開創社會治理人機共生新圖景”。實現這一愿景,機器具身將成為重要環節,意味著機器從被動工具轉變為人類協同的合作伙伴,推動服務業向智能驅動的新型服務方式演進。
認知機器可以通過抽象、聯想和交互,實現思維軟構體的自我復制和復用,生成新的思維軟構體。其之所以能夠在短時間內創造巨大價值,正是因為充分利用了思維軟構體幾乎無限制的可復制性,這是生命智能難以做到的。事實已經證明,目前一些大模型已經可以學用自然語言,或聊天,或寫作,常態化通過自然語言的圖靈測試。相比人類自然語言,任何計算機語言的語境、語用、語義、語法,受限要苛刻得多。認知機器可以學用各種各樣的計算機編程語言,做到自編程、自糾錯。通過學習和實踐,實現機器認知的自成長。
對智能駕駛而言,機器具身的交互認知無處不在。在感知過程中,通過跨模態交互,不但互補印證,也消解沖突,確保協同,以聚焦駕駛的態勢;認知過程中,用不同記憶區之間的交互認知,確保各智其智,用記憶和計算之間的交互,確保記憶約束計算;行駛過程中,通過交互,用自動調節和控制確保形體動作的穩定性以及與環境的協同。機器通過抽象、聯想和交互,實現思維軟構體的自我復制,通過自編程擴充自己的認知,自我成長。盡管機器無法改變自身的硬構體,但可通過交互,提出擴充感知手段和行為能力的硬構體要求,迭代升級,適應環境,與時俱進地成長,亦或創造新思維,創造新的解釋模式。人工智能的下一個里程碑,或將是機器具身圖靈測試的常態化,而高級別智能駕駛車輛的具身圖靈測試,將成為所有機器智能測試的領頭羊,率先垂范。
智能駕駛產業化,標志著汽車產業從傳統工業制造邁向智能制造,這一趨勢同樣適用于水上與空中交通領域。各類具身機械設備,如汽車、火車、農機、艦艇等,其發展都將朝著可交互、會學習、自成長的機器人形態演進。到2055年,人工智能發展的一百年節點,全球將進入智能網聯生態的全盛時期。屆時,無人服務與人工服務將高效協同,共同創造出全新服務范式,具備交互能力、持續學習與自主進化特性的輪式機器人及其編隊智能駕駛技術將廣泛普及,推動人機共生、協同共創、迭代發展不斷走向深入。
【本文作者為中國工程院院士,歐亞科學院院士,軍事科學院系統工程研究院研究員】
注釋略
責 編:張 凡/美編:石 玉